Malo ogwirira ntchito a robotics achitsulo chosapanga dzimbiri cha aluminiyamu 6 Axis






Kufotokozera
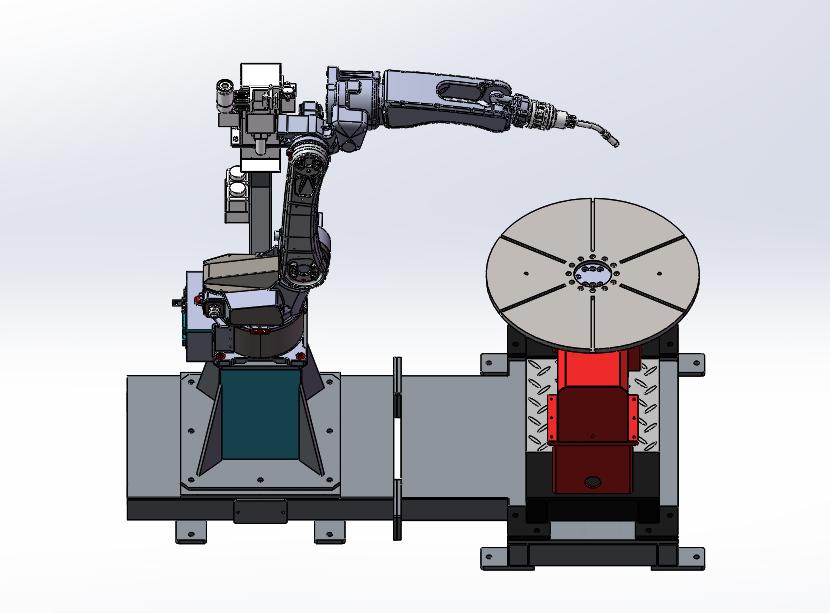
Choyimira cha 2 axis chimatha kusinthasintha mopingasa ndi kuzungulira mopingasa ndi ±180°.
Kuzungulira kwa choyimilira kumayendetsedwa ndi kabati yowongolera yomwe imalumikizana pansi pa kabati yowongolera ya loboti. Panthawi yowotcherera, imatha kuchita mayendedwe ogwirizana pakati pa loboti ndi choyimilira.
Choyimitsa ichi ndi choyenera pa zinthu zogwirira ntchito zomwe zimafunika kulumikizidwa pamakona osiyanasiyana ndipo chingagwiritsidwe ntchito ndi maloboti olumikizirana kuti ntchito yolumikizirana ikhale yosinthasintha komanso kuti ntchito yolumikizirana ikhale yabwino komanso yothandiza.
Chizindikiro chaukadaulo cha Positioner
| Chitsanzo | JHY4030P-080 |
| Voteji Yolowera Voltage | Gawo limodzi la 220V, 50/60HZ |
| Kuteteza Magalimoto | F |
| Tebulo la Ntchito | M'mimba mwake 800mm (ikhoza kusinthidwa) |
| Kulemera | Pafupifupi 400kg |
| Malipiro Ochuluka | Kunyamula katundu wa Axial ≤300kg / ≤500kg / ≤1000kg (>1000kg ikhoza kusinthidwa) |
| Kubwerezabwereza | ± 0.1mm |
| Malo Oyimitsa | Udindo uliwonse |
Zigawo za malo ogwirira ntchito a roboti
| Chogulitsa | Kuchuluka |
| Loboti yowotcherera ya 6 axis | Seti imodzi |
| Choyimira chozungulira ziwiri | Seti imodzi |
| Gwero la mphamvu yowotcherera | Seti imodzi |
| Tochi yowotcherera | Seti imodzi |
| Bokosi lowongolera | Ma PC awiri |
| Malo oyeretsera miyuni | Seti imodzi |
| Sitima yolunjika ya loboti | *m (ngati mukufuna) |
| Sensa ya laser | Seti imodzi (ngati mukufuna) |
| Nsalu yotchinga chitetezo | Seti imodzi (ngati mukufuna) |
| Mpanda wotetezeka | *m (ngati mukufuna) |
Chifukwa chiyani mutisankhe?
1. Ndife amodzi mwa ma robot opangidwa ndi opanga ku China.
2. Sitife opanga ma robot okha komanso timapanga ma positioner.
3.Zaka zoposa 10 zaukadaulo mu mapulojekiti ophatikizidwa a robotic.
4. Makina owongolera ma robot ndi osavuta kugwiritsa ntchito komanso okhazikika kugwiritsa ntchito.
5. Dongosolo lowongolera loboti limatha kuwongolera mpaka ma axel 12.
6. Zogulitsa zathu zagulitsidwa m'maboma opitilira 30 ku Southeast Asia, Western Asia, Europe, North America, South America, Australia, ndi zina zotero.
Magulu a zinthu
-

Loboti yolumikizira ya 2000mm yolumikizira kaboni ...
-

Chowongolera chowongolera cha RV cholondola kwambiri
-

Mpweya Zitsulo Zosapanga Zitsulo Mig kuwotcherera Roboti ...
-

Makina olumikizirana a 500A oziziritsidwa ndi madzi okhala ndi axis 6 MIG...
-

JHY 6 olamulira loboti mkono mafakitale odziyimira pawokha arc m ...
-

Mkono wa loboti wa Aluminium wowotcherera wa ku China wapamwamba kwambiri