Robot Yowotcherera ya Mig Yapamwamba Kwambiri Yaku China Yowotcherera Chitsulo Chosapanga Dzira







Thupi la Robot
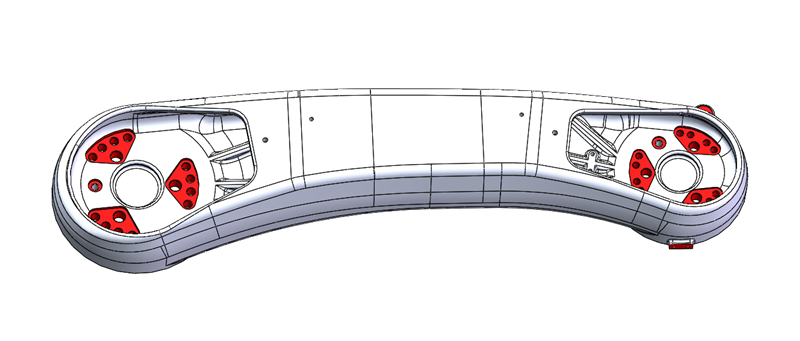
Loboti ya JHY imasintha kwambiri njira yopangira die-casting ndi kapangidwe ka tsatanetsatane wa thupi, Gulu lathu la R&D lapanga zinthu zambiri zatsopano pakupanga thupi la loboti, lili ndi ma patent atsopano opitilira khumi.
Mwachitsanzo, mzere wachisanu ndi chimodzi unapanga njira yotumizira yolondola kwambiri komanso mipiringidzo yolimbitsa, komanso diski yotulutsa mawilo asanu ndi limodzi imagwiritsa ntchito kapangidwe kopanda magiya, zomwe zinathandiza kwambiri kuti lobotiyo ikhale yolondola komanso yokhazikika. Ngakhale tochi yowotcherera igwire ntchito movutikira, imathabe kutsimikizira kukhazikika komanso popanda kugwedezeka. Mfundo iyi yatsimikiziridwa ndi makasitomala athu akunyumba.
Thupi la loboti limapangidwa ndi ukadaulo wopangira zinthu zofewa, izi zimapangitsa maloboti athu okhala ndi mphamvu zambiri, opepuka. Dzanja lakutsogolo likhoza kukhala lopapatiza komanso lalitali, Chiŵerengero pakati pa dzanja lakumtunda ndi dzanja lakutsogolo chili pafupi ndi chiŵerengero chagolide, kotero kuyenda kumakhala kosinthasintha komanso mwachangu.
Kapangidwe ka Chidule
Kapangidwe ka mkono wa robot wowongoka ndi kosavuta komanso kokongola. Ndi kapangidwe kake, kogwirizana kwambiri ndi kukongola kwa msika waku Europe. Kapangidwe ka thupi la robot kagwiritsa ntchito ma patent angapo aukadaulo, thupi latsopano la robot ndi langwiro kwambiri.
Mtundu Wapamwamba Wa Mawaya
Mawaya amkati ndi ma terminal a loboti amapangidwa ndi makampani apamwamba aku Japan: DYEDEN, TAIYO, omwe ndi ABB ndi Fanuc.
Terminal: Mtundu wa ku Italy wa Yierma.
Mitundu Yotsogola ya Servo Motor / Driver / Reducer
Onsewa amagwiritsa ntchito makampani otsogola ku China. Mtundu uliwonse wakhala ukuyesedwa ndi kufufuzidwa kwa nthawi yayitali chisankho chomaliza chisanaperekedwe, kuti zitsimikizire kuti makampaniwa ndi oyenera kugwiritsa ntchito maloboti athu komanso kuti khalidwe lawo ndi magwiridwe antchito awo ndi okhazikika komanso odalirika.
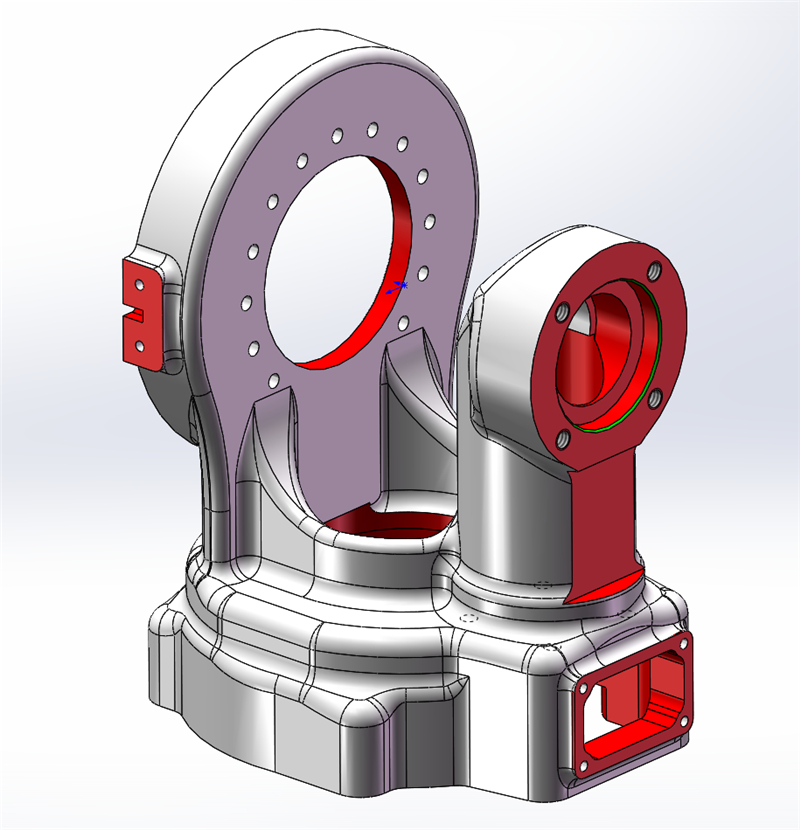
Ma axis a J1 ndi J2 amagwiritsa ntchito kapangidwe ka ma shaft atatu osasunthika okhala ndi torque yofika 65 Nm zomwe zimachepetsa kutopa kwa giya ndikuwonjezera moyo wa ntchito ya reducer. Ma robot a JHY J1 ndi J3 axis reducers pakadali pano ndi omwe ali ndi mawonekedwe apamwamba kwambiri ku China.
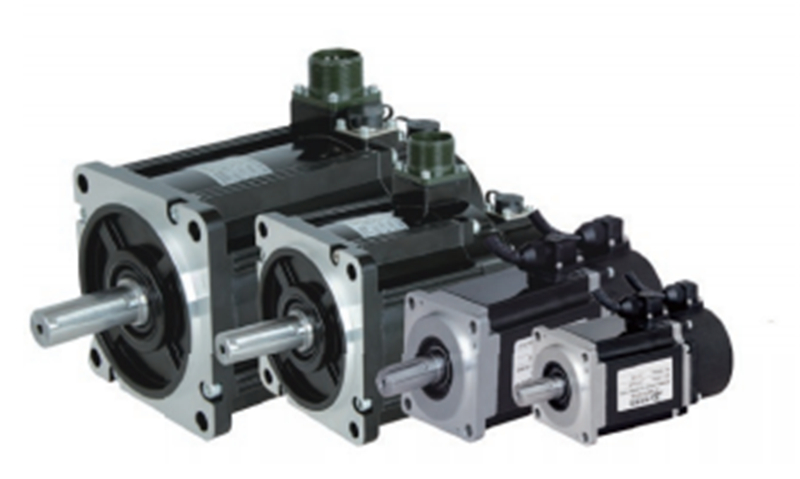
Ponena za mota ya servo, Tsopano tikugwiritsa ntchito mota ya 3kw makamaka pa maloboti.
Pa maloboti a 1.8m ndi 2m, mphamvu yoyendetsera yomwe imafunika pa nkhwangwa yoyamba ndi yachiwiri ndi yayikulu, ndipo zofunikira pa mphamvu ya injini nazonso ndi zapamwamba.
Ma injini olondola kwambiri komanso opangidwa m'njira zosiyanasiyana amatha kukwaniritsa zofunikira zonse za loboti yathu.

Zaka 3/7500h Zopanda Kukonza
Kukonza zinthu n'kosavuta, makasitomala okha amatha kugwira ntchito mosavuta.
Ma Patent ndi Mapangidwe Ena
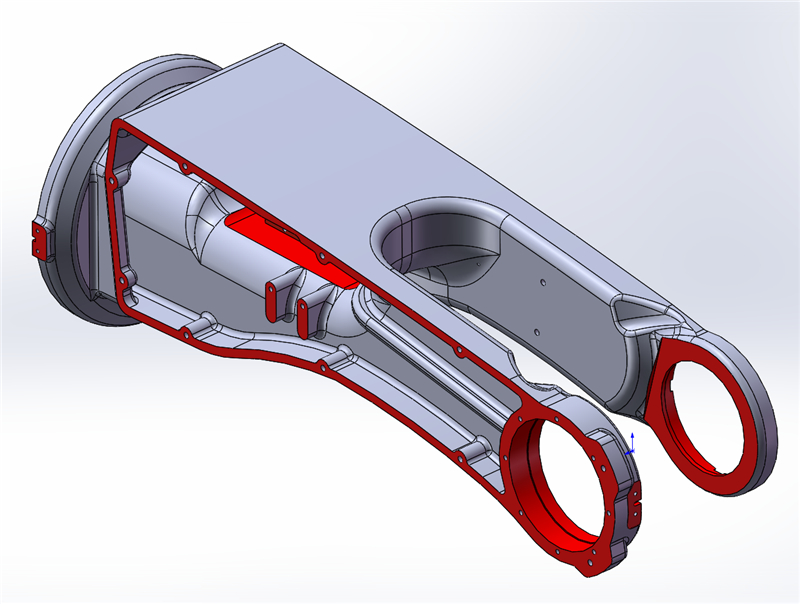
Kutumiza kwachiwiri kwa ma axis 6 kunasinthidwa kukhala maulumikizidwe awiri a lamba, kunawonjezera chiŵerengero cha kutumiza, ndipo kunathetsa vuto la kuyenda kwa ma axis 6 mofulumira kwambiri komanso molakwika. Disiki yotulutsa ya six-axis idapangidwa popanda magiya, yokhala ndi njira yotumizira yolondola kwambiri, zomwe zimapangitsa kuti mayendedwe a six-axis akhale olondola... Pakadali pano tili ndi ma patent opitilira 30 okhudzana ndi loboti yolumikizira.
Kanema
Magawo
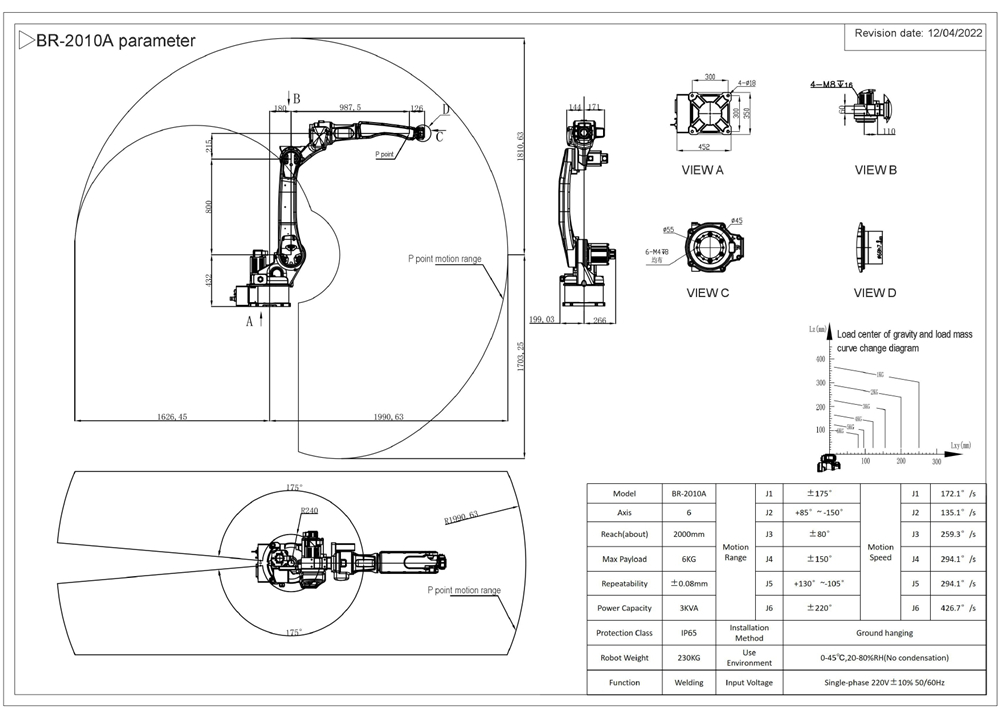
| Chitsanzo | BR-2010A | Malo Oyendera | J1 | ±175° | Liwiro Loyenda | J1 | 172.1°/s |
| Axis | 6 | J2 | +85°~ -150° | J2 | 135.1°/s | ||
| Kufikira (pafupifupi) | 2000mm | J3 | ± 80° | J3 | 259.3°/s | ||
| Malipiro Ochuluka | 6KG | J4 | ±150° | J4 | 294.1°/s | ||
| Kubwerezabwereza | ± 0.08mm | J5 | +130°~-105° | J5 | 294.1°/s | ||
| Mphamvu Yokwanira | 3KVA | J6 | ±220° | J6 | 426.7°/s | ||
| Gulu la Chitetezo | IP65 | Njira Yokhazikitsira | Kupachika pansi | ||||
| Kulemera kwa Robot | 230KG | Gwiritsani Ntchito Malo Ozungulira | 0-45℃, 20-80% RH (Palibe kuzizira) | ||||
| Ntchito | kuwotcherera | Lowetsani Voltage | Gawo limodzi 220V ± 10% 50/60Hz | ||||
Magulu a zinthu
-

Malo Ochitira Ma Robot Osewerera a MIG Okhala ndi Ma Axis Otsika 6 1800mm
-

Malo Oyeretsera a Roboti Okhala ndi Axis MIG MAG 6 1500mm Ndi ...
-

Loboti yowotcherera yapamwamba kwambiri yogwiritsidwa ntchito kuwotcherera mipando
-

JHY 6 olamulira loboti mkono mafakitale odziyimira pawokha arc m ...
-

Loboti yolumikizira ya 2000mm yolumikizira kaboni ...
-

Loboti yowotcherera ya MIG yokhala ndi kutalika kwa 2000mm kwa stainles ...